April 11, 2025
Knowledge base / System architecture
Case study: a ROS 2-based autonomous forklift system
How a ROS 2-based approach can help modernize existing forklifts and structure the development of autonomous functions.
5 min
Teams that want to understand technical decisions faster, without reading the whole article line by line first.
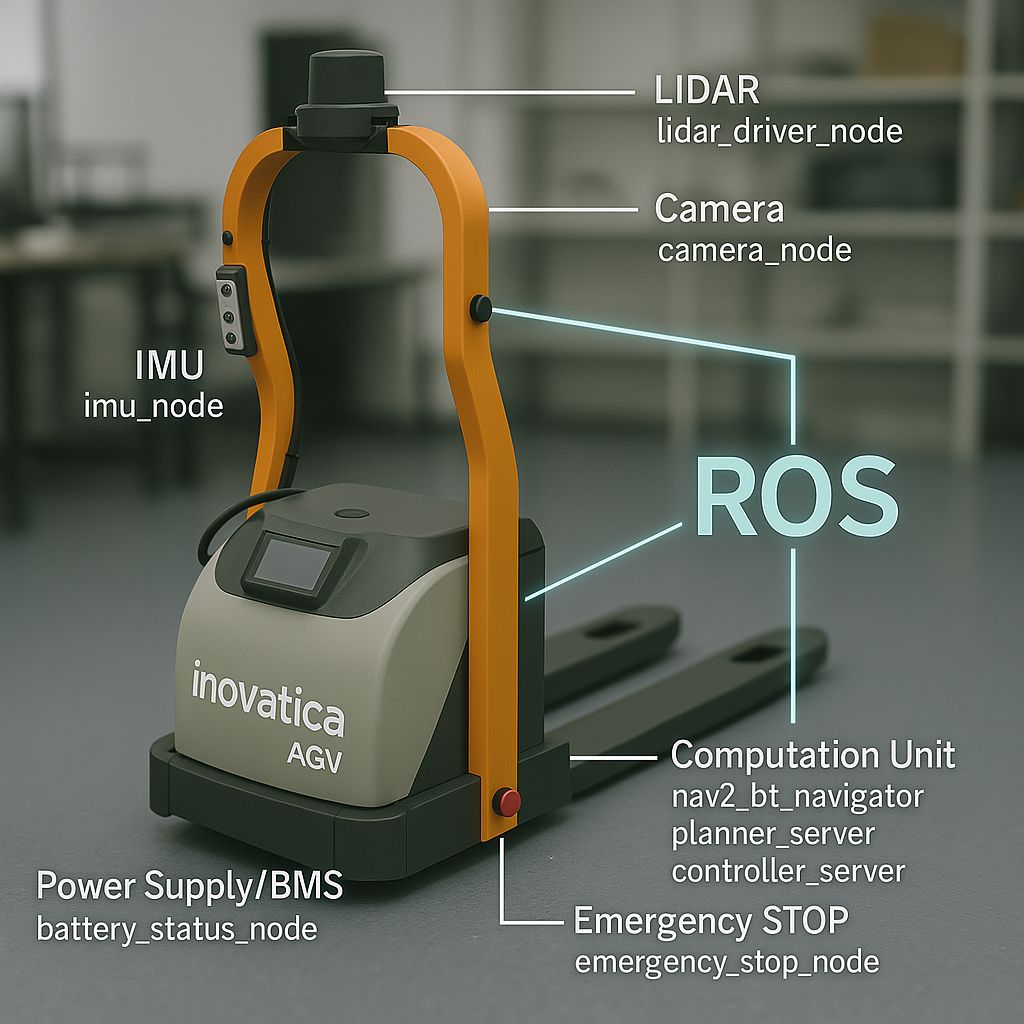
ROS 2 can be a useful architecture layer when the goal is to organize autonomy functions, perception modules and communication in a more modular way. It becomes especially valuable in projects that build on existing forklifts instead of starting from a fully closed platform.
The critical question is not whether ROS 2 is modern, but whether the architecture remains maintainable, safe and predictable in an industrial environment. That is what decides whether a prototype can evolve into a usable deployment.
Supporting source:
Original material
![]()
Next step
Do you want to turn this knowledge into a concrete project decision?
We can point to the technology, architecture or AGV / AMR use case that makes sense in your process and define the best place to start.