Transport poziomy 
TU-10 AGV
TU-10 AGV wspiera większe pętle logistyki wewnętrznej, w których jeden autonomiczny pojazd holowniczy może przejąć znaczną część powtarzalnego transportu ręcznego.
dłuższe trasy holowniczewiększe zestawy transportowepętle zasilania produkcji
Produkt jest przygotowany do wdrożenia w środowisku przemysłowym z uwzględnieniem wymagań oznaczenia CE, dokumentacji technicznej i procesu oceny zgodności dla bezpiecznej eksploatacji.
Parametry TU-10 AGV
| Parametr | Wartosc |
|---|---|
| Nazwa produktu | Autonomiczny Robot mobilny |
| Typ operacji | Autonomiczny |
| Typ nawigacji | Laser SLAM |
| Typ nośnika | Platforma na wspornikach |
| Maksymalny udźwig | 500 / 1000 kg |
| Prześwit podwozia | 30 mm |
| Waga (z baterią) | 265 kg |
| Maksymalna wysokość podnoszenia | 60 ±1 mm |
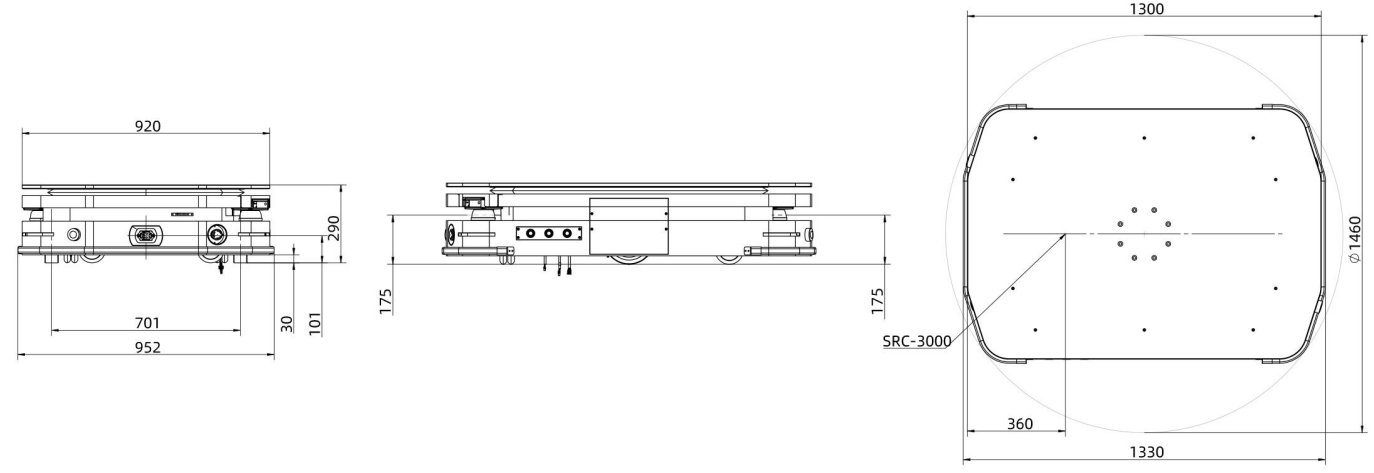
| Wymiary robota mobilnego (dł. x szer. x wys.) | 1330 x 952 x 290 mm |
| Wymiary platformy (dł. x szer.) | 1300 x 920 mm |
| Wysokość skanowania laserów nawigacyjnych | 175 mm |
| Minimalna szerokość alejki | 1050 mm |
| Średnica obrotu | 1460 mm |
| Zakres temperatury otoczenia | 0ºC do 50ºC |
| Zakres wilgotności otoczenia | 10% do 90%, ciśnienie normalne, brak kondensacji |
| Prędkość jazdy | do 1,5 m/s |
| Przejezdność (nachylenie / próg / szczelina) | <5% / 5 mm / 10 mm |
| Dokładność pozycjonowania nawigacji | ±5 mm |
| Dokładność kąta nawigacji | ±1° |
| Specyfikacja baterii | 48 V / 40 Ah (LiFePo4) |
| Czas pracy na baterii | do 7 h |
| Czas ładowania (10% do 80%) | ≤2 h |
| Metoda ładowania | Ręczna / Automatyczna |
| Liczba lidarów | 2x SICK |
| Wi-Fi roaming | Standard |
| Funkcje podstawowe | Standard |
| Obsługa ładowania automatycznego | Standard |
| Rozpoznawanie platform nośników | Standard |
| Rozpoznawanie palet na regałach | Standard |
| Nawigacja reflektorowa | Opcja |
| Przycisk awaryjny (E-stop) | Standard |
| Sygnalizacja dźwiękowa | Standard |
| Sygnalizacja świetlna | Standard |
| Listwa zderzakowa | Standard |
| EMC / ESD | Standard |
| UN38.3 | Standard |
| MD | Standard |
| RED | Standard |
Wymiary
Kolejne kroki
Kolejne kroki dla TU-10 AGV
Dobieramy zakres uruchomienia, wymagania integracyjne i model pracy systemu tak, aby pierwszy etap wdrożenia szybko potwierdził sens biznesowy projektu.